







![]()
AI Research Starts Here
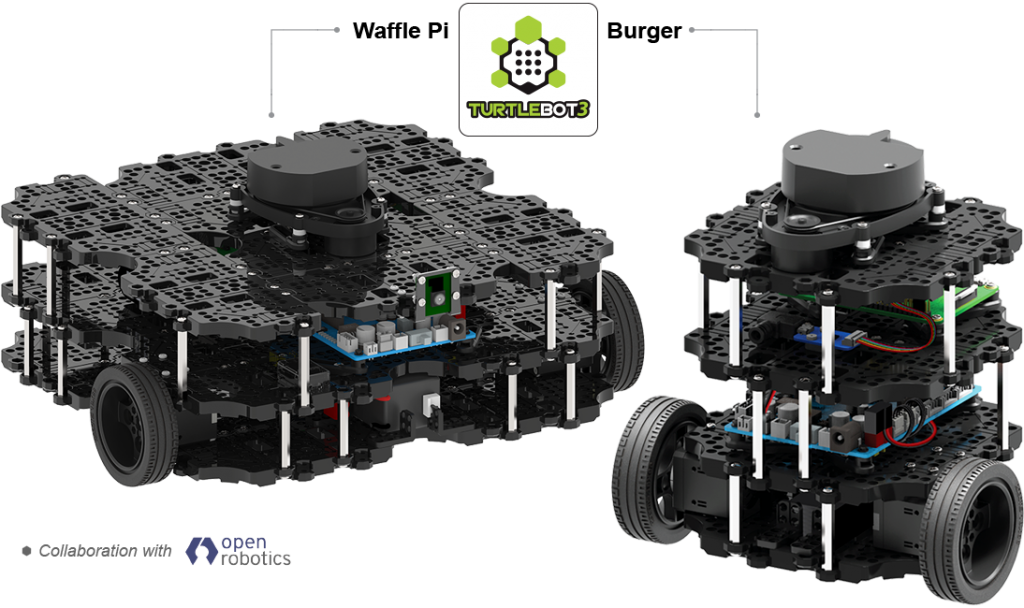
ROS Official Platform
TurtleBot3 is a new generation mobile robot that’s modular, compact and customizable.
Let’s explore ROS and create exciting applications for education, research and product development.
Features
 |
WORLD’s MOST POPULAR ROS PLATFORM TurtleBot is the world’s most popular open source robot for education and research. |
 |
AFFORDABLE COST TurtleBot is the most affordable platform for educations and prototype research & developments. |
 |
SMALL SIZE Imagine the TurtleBot in your backpack and bring it anywhere. |
 |
EXTENSIBILITY Extend ideas beyond imagination with various SBC, sensor, motor and flexible structure. |
 |
MODULAR ACTUATOR Easy to assemble, maintain, replace and reconfigure. |
 |
OPEN SOURCE SOFTWARE Variety of open source software for the user. |
 |
OPEN SOURCE HARDWARE Schematics, PCB Gerber, BOM and 3D CAD data are fully opened to the user. |
 |
STRONG SENSOR LINEUPS High utilized Raspberry Pi Camera, Enhanced 360° LiDAR, |
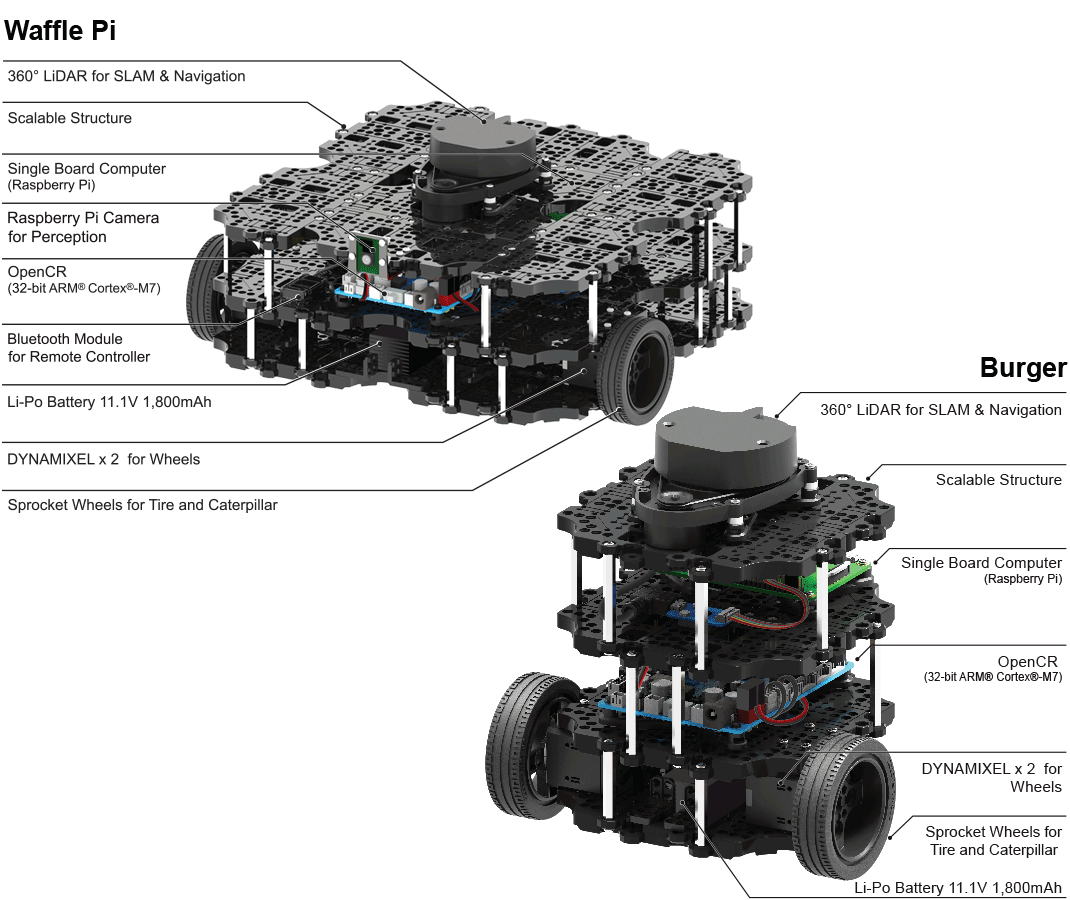
Main Components
Specification
|
Items |
Waffle Pi |
Burger |
| Maximum Translational Velocity | 0.26m/s | 0.22m/s |
| Maximum Rotational Velocity | 1.82rad/s (104.27 deg/s) | 2.84rad/s (162.72 deg/s) |
| Maximum Payload | 30kgs | 2.84rad/s (162.72 deg/s)15kgs |
| Size (L x W x H) | 281mm × 306mm × 141mm | 138mm × 178mm × 192mm |
| Weight (+ SBC + Battery + Sensors) | 1.8kgs | 1kg |
| Operating Time | About 2hr | About 2hr 30m |
| Charging Time | About 2hr 30m | About 2hr 30m |
| DYNAMIXEL | XM430-W210-T | XL430-W250-T |
| SBC | Raspberry Pi 3 | Raspberry Pi 3 |
| Sensor | Raspberry Pi Camera 360°LiDAR 3-Axis gyroscope 3-Axis accelerometer 3-Axis magnetometer |
360°LiDAR 3-Axis gyroscope 3-Axis accelerometer 3-Axis magnetometer |
|
Raspberry Pi Model B |
Raspberry Pi Camera Module V2 |
360°LiDAR |
 |
 |
 |
| ▪ CPU : Quad Core 1.2GHz ▪ 1GB RAM ▪ Wireless LAN and BLE on board ▪ External Ports |
▪ Size : 25 × 24 × 9 mm ▪ Still Resolution : 8Megapixels ▪ Video modes : Max 1080p30 ▪ Sensor : Sony IMX219 |
▪ Detection distance : 120mm ~ 3,500mm ▪ Angular Range : 360° ▪ Angular Resolution : 1° |
Functions
SLAM
Navigation
Autonomous Driving
Manipulation
Used Cases
R-BIZ Challenge – TurtleBot3 AutoRace
KAIST Fall Semester Project
TurtleBot3 Delivery Service Demo
Simulation in Gazebo
with ROS Development Studio
Homepage http://www.turtlebot.com
E-Manual http://emanual.robotis.com/
Github https://github.com/ROBOTIS-GIT/turtlebot3
Community https://discourse.ros.org